iRobot Roomba Umbau
iRobot Roomba 774 Umbau mit einem ESP32
Dieses Projekt basiert auf einem anderen Projekt und wurde komplett verändert.
Ich gebe trotzdem eine Grund Informationsquelle an www.rohrhofer.org
Einbau eines Wlan Moduls ESP32 in den IRobot Roomba 774, so dass man den Roomba per html oder auch mit MQTT steuern kann.
Zusätzlich wurde ein NTP Abgleich eingebaut, so dass in der Grundeinstellung alle 24 Stunden oder beim ESP Neustart die Zeit im Roomba gestellt wird.
Ich bediene über Openhab2 und MQTT, damit man z. Bsp. über Alexa den Saugvorgang starten kann
Geräte infos iRobot Roomba 774 ohne Wifi
Komponenten:
- 1 x ESP32 D1 Mini WemosD1 EBAY ESP32 D1 Mini WemosD1
- 1 x LM2596S DC-DC Netzteil Adapter Step down Modul für Arduino EBAY LM2596S
Schaltbild:
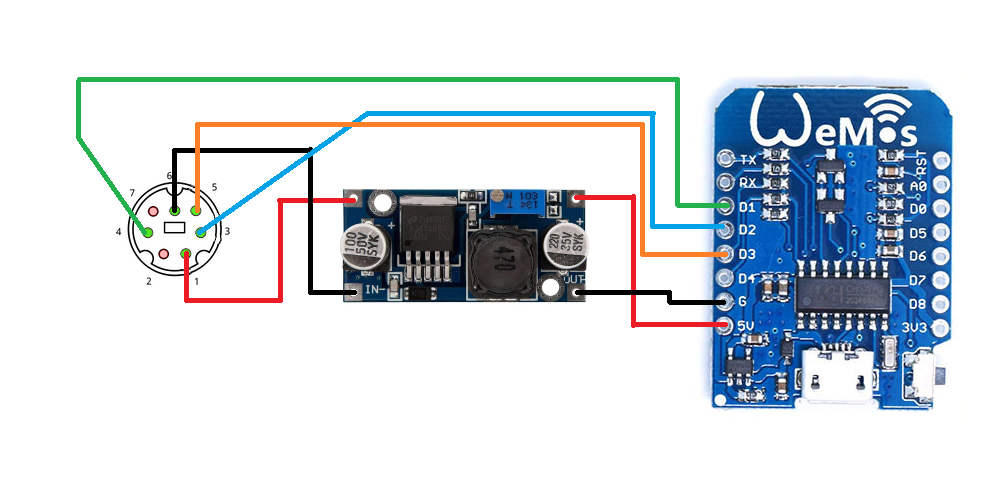
iRobot Roomba 774
Pin 6 GND
Pin 5 Wakeup
Pin 3 RXD
Pin 4 TXD
Pin 1 Vcc 15,8V
ESP32 Wemos D1 mini
Pin 5 ->> ESP32 0 D3 Wakeup orange
Pin 3 ->> ESP32 4 TXD D2 blau
Pin 4 ->> ESP32 5 RXD D1 grün
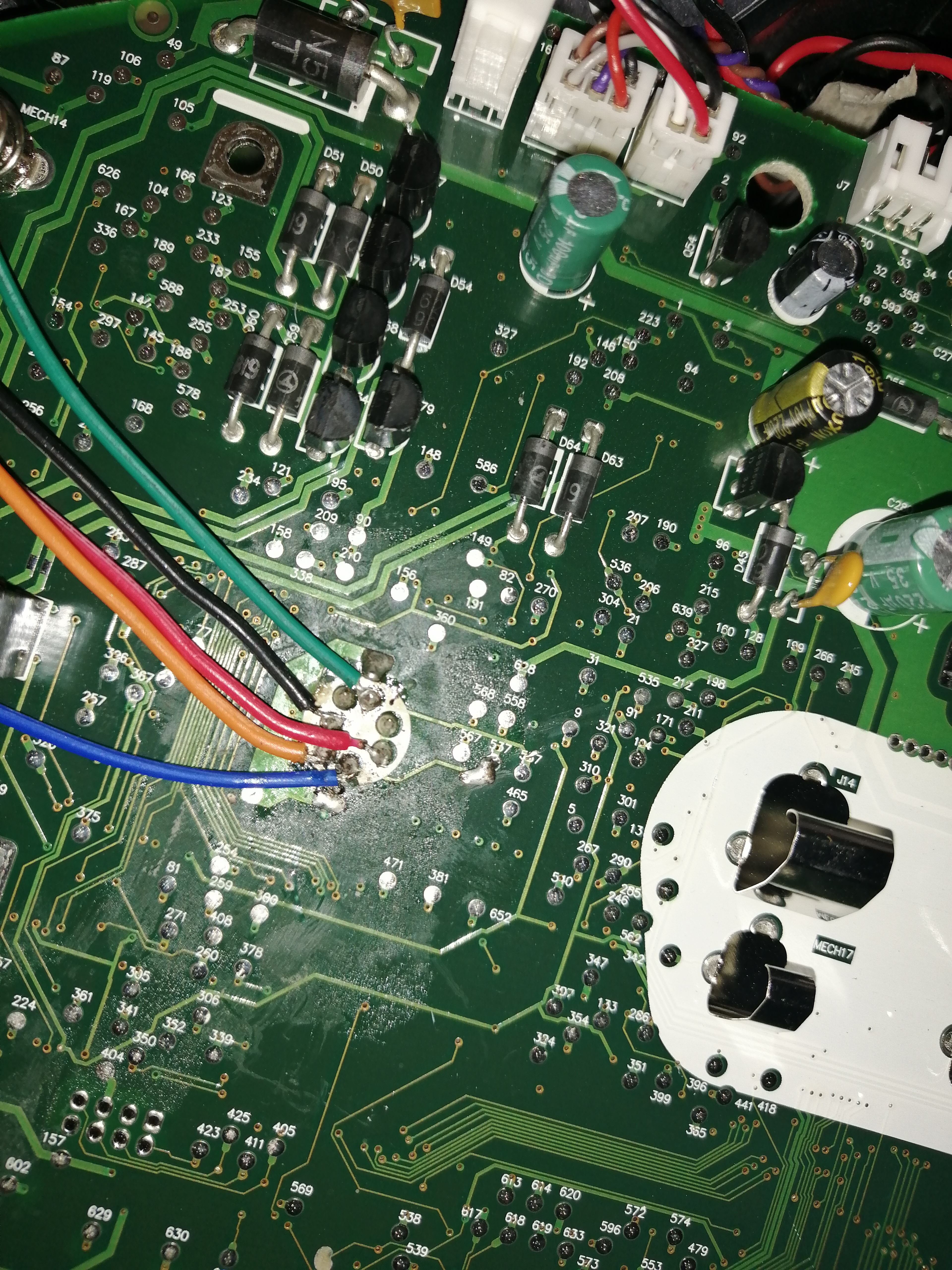
Als erstes öffnet man den Roomba indem man den oberer Ring abklippst und danach alle oberen Schrauben entfernt. Von unten muss der Akku raus genommen werden und auch die unteren 2 Halteschrauben der Abdeckung lösen. Danach den vorderen Anstoß Sensor entfernen, indem man die unteren Schrauben löst. Nun geht der Anstoß Sensor ganz leicht ab. Danach von oben die Bedienungs Abdeckung abschrauben und die untere Folie entfernen. Die obere große Abdeckung sollte mum leicht abgehen. Die Platine wird von 5 Schrauben gehalten, diese alle lösen. Im hinteren Teil sind 4 Steck-Verbindungen, diese Kabel lösen. Danach sollte sich die Platine nach vorne kippen lassen, um an die Lötpunkte der Seriellenbuchse zu kommen.
Bild von unten mit angelöteten Kabeln
Einbau der Platine und Schrauben mit Kabeln

Nun kommen wir zum Einbau des Spannungswandlers. Da am seriellen Anschluss 14 Volt anliegen, muss die Spannung auf 5V runter. An der hinteren Seite links ist so viel Platz, dass der Wandler da locker reinpasst. Bitte vergesst nicht den Spannungsregler mit dem Poti auf 5V einzustellen .
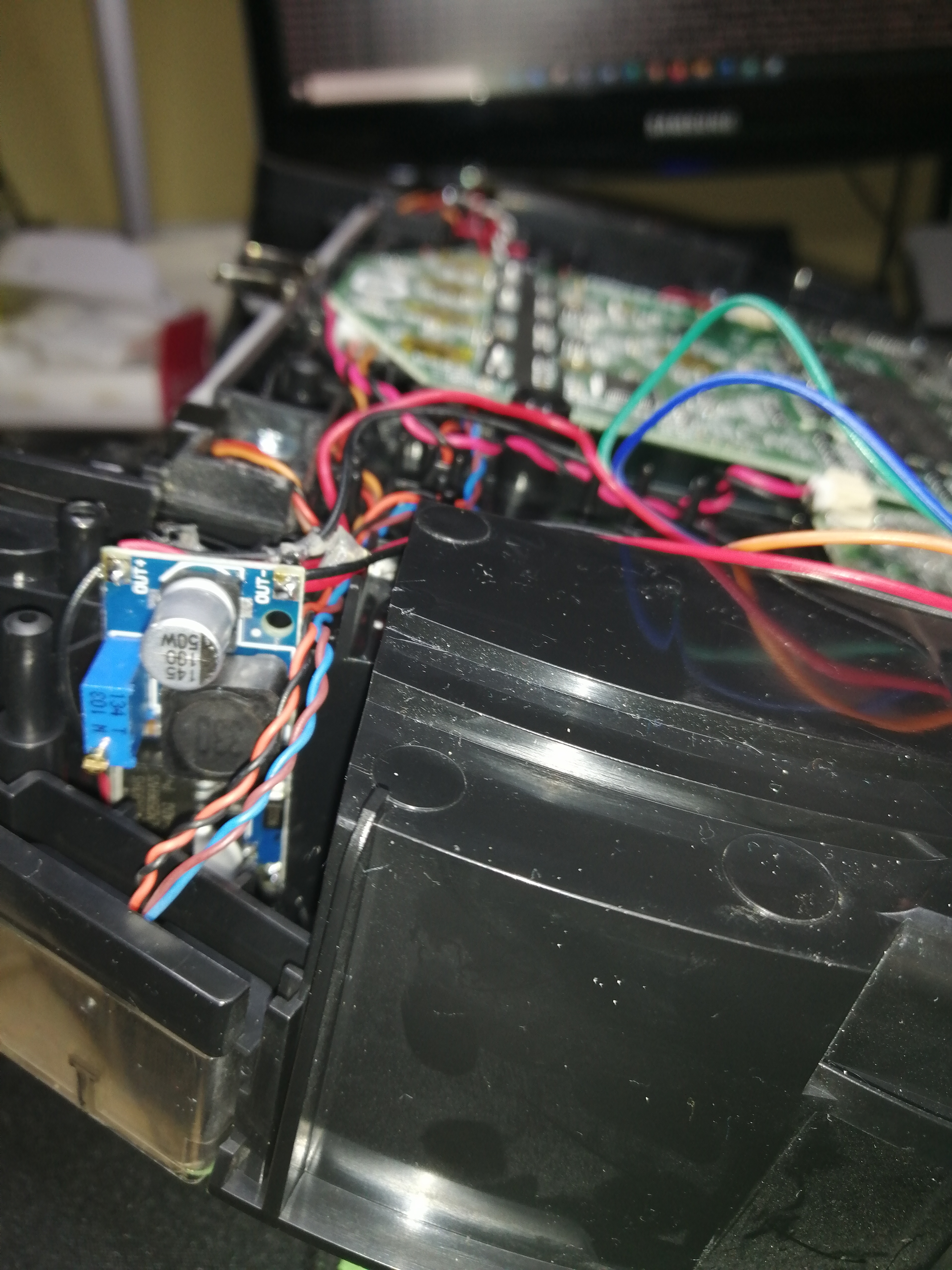

Nun wird der Arduino WemosD1 mini eingebaut und verlötet. Siehe Bild. Achtung - auf dem Bild unten ist ein Fehler: Der orange Draht ist auf dem falschen Pin!
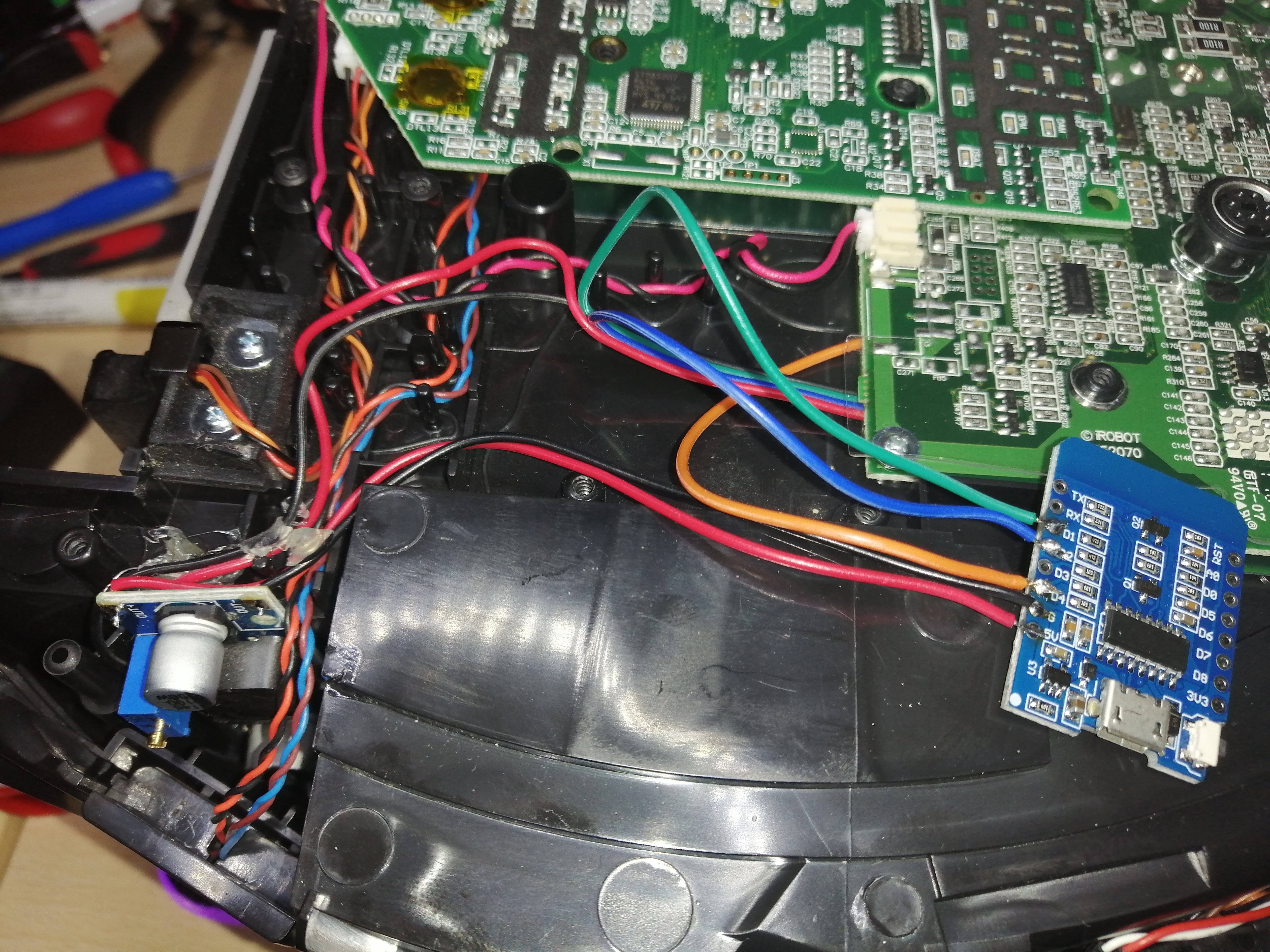
Im letzten Bild habe ich die obere Abdeckung angebaut und den WemosD1 platziert. Jetzt ist es Zeit das Programm mit IDE einzuspielen.

Handbuch eines Roombas mit den Serielen Codes und Anschlüssen
Roomba Handbuch Seriel Connect
Download IDE libraries
verwendete libraries
Download IDE Projekt code
Programmcode
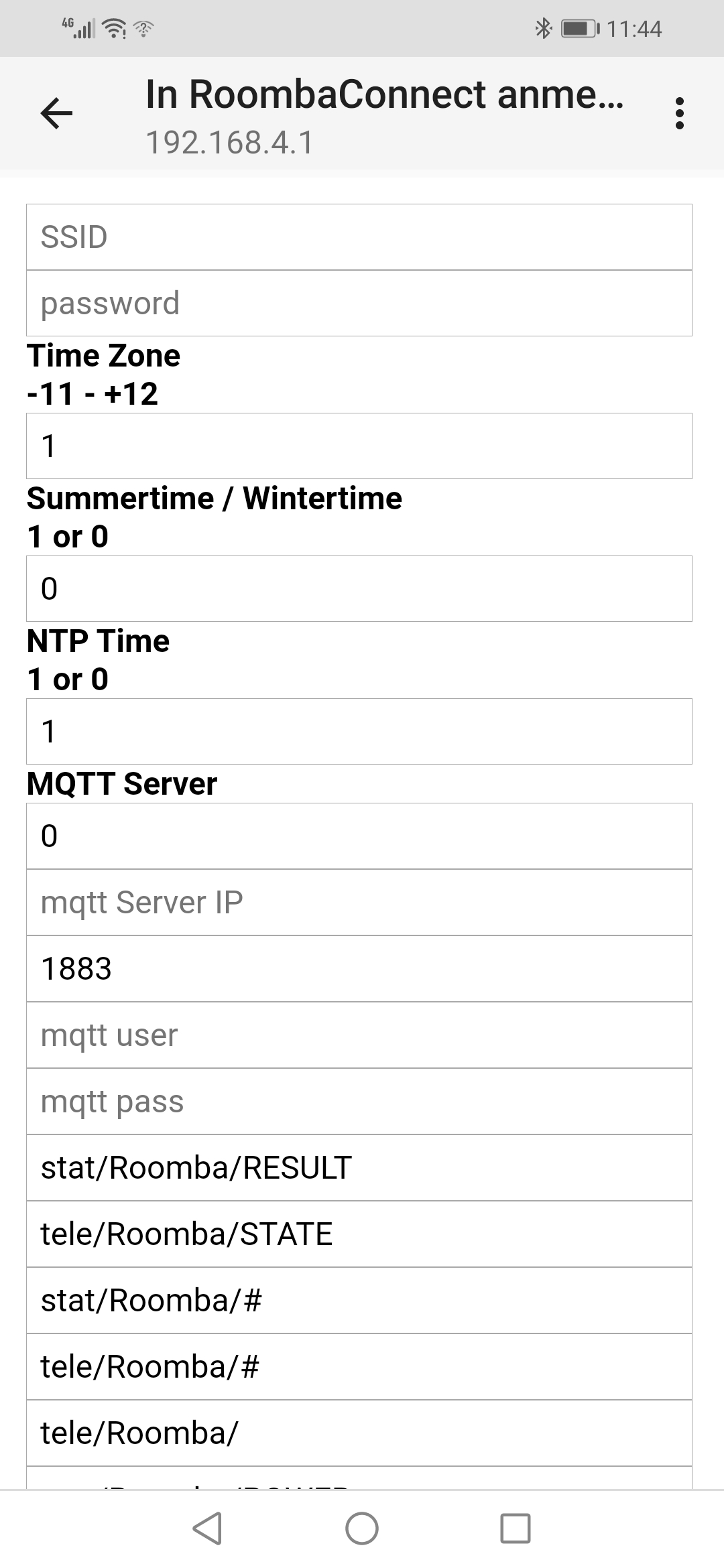
Wenn alles richtig ist, sollte der Roomba ein Wlan erzeugen, wo ihr euch mit einem Wlan Gerät einloggen und die Grundeinstellunegn vornehmen könnt.
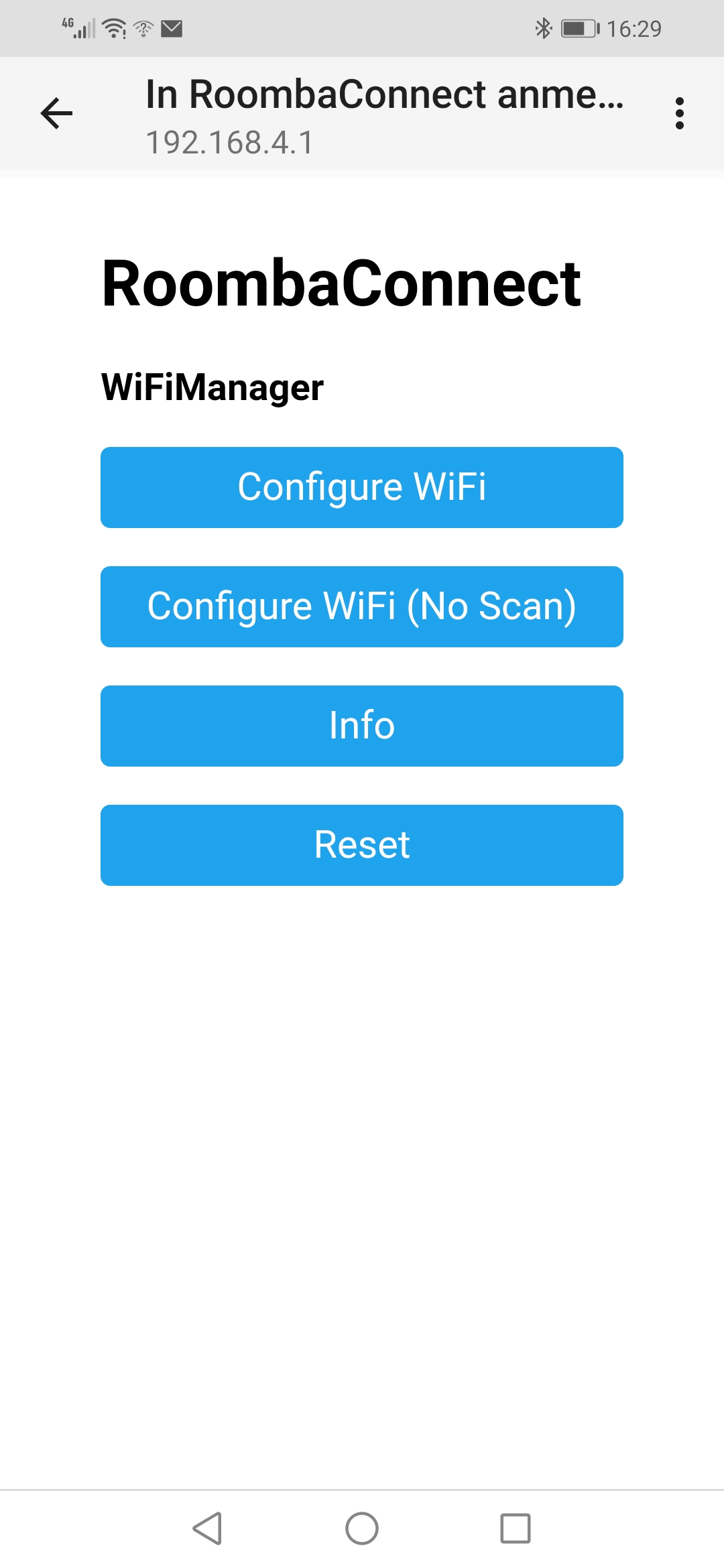
Oben sind die Wlan Daten gefolgt von MQTT Daten und ganz unten sind login Benutzer und Passwort in Base64 verschlüsselt (admin:admin).
Alle weiteren Daten können bei Bedarf geändert werden.
Die Webbrowser Oberfläche sieht nach dem Login so aus.
Mit Steuerungselementen und auch Restart Button für den ESP, Reset Sittings für das Löschen des ESP in Grundeinstellung und auch eine OTA Update Möglichkeit.
Achtung, bei dem OTA Update solltet ihr darauf Achten keine Menü Punkte im WifiManager hinzuzufügen. Dann stimmen die EEprom Daten nicht.
Der ESP startet nicht mehr und ihr müsst mit IDE über USB die Firmware neu einspielen.

Programmiervorschlag fuer OPENHAB 2
Die Schlüsselwörter für Alexa sind in den items definiert (Clean,Dock,Spot,STOP,Power) z.B Clean an.
Vorraussetzung einer Alexa Steuerung ist die Anbindung an die OpenhabCloude und Skill in Alexa
vacuum_cleaner.items
Home.sitemap